Fondamentalmente si tratta di questo:
in uno schema di un sistema di controllo completo come:
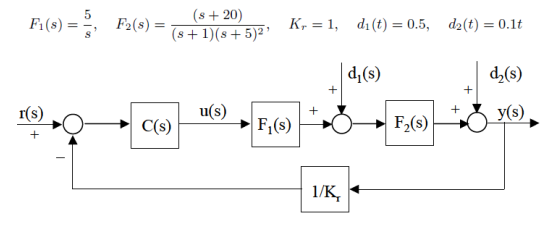
Devi progettare unicamente la FdT del controllore ovvero .
Da qui in poi, considereremo sempre dove i vincoli statici (tempo di salita , sovraelongazione massima) saranno dettati da e ( il numero di integratori).
- Le specifiche su portano ad individurare un valore desiderato della pulsazione di crossover
- Le specifiche sulla sovraelongazione massima o sul picco di risonanza portano ad individuare un valore minimo del margine di fase . La viene allora costruita in modo che abbia e .
- Per costruire accordingly, prima di tutto la poni e vedi di quanto ti discosti da ciò che volevi:
- Valutiamone modulo e fase per
- Otteniamo una (variazione di modulo) definita come il numero di Decibel (si può anche fare in unità naturali) necessarie a portare la pulsazione di crossover di a
- Sì perchè in sostanza a dovrei avere modulo dB per avere che quella sia veramente la pulsazione di crossover, quindi devo sicuramente mettere il davanti (devo operare un movimento opposto).
- Otteniamo un (variazione di fase) definita come il numero di gradi o radianti necessari ad ottenere alla pulsazione
- Anche qui, alla pulsazione di crossover hai che corrisponde esattamente il margine di fase
- se è positivo allora la variazione di fase che va introdotta è un anticipo, se è negativa è un ritardo
- Otteniamo una (variazione di modulo) definita come il numero di Decibel (si può anche fare in unità naturali) necessarie a portare la pulsazione di crossover di a
- Una volta valutati gli scostamenti da ciò che la specifica richiede usando , si può procedere a cercare di capire come effettivamente deve essere fatto: in pratica, è la FdT di un complesso di reti di compensazione.
Principali reti di compensazione
Anticipatrici o derivative
Una rete anticipatrice ha una FdT del tipo
con , uno zero in e un polo in .
- I valori di che considereremo sono sempre .
- All’aumentare di cresce l’anticipo di fase e anche il modulo nella pulsazione di crossover
- m_d=\frac{1+\sin(\varphi_\max)}{1-\sin(\varphi_\max)}
- \varphi_\max=\arcsin\left(\frac{m_d-1}{m_d+1}\right)
- La si trova da
- Quindi le reti anticipatrici si usando quando si vuole recuperare fase e si vuole recuperare modulo, qunidi e . Se il recupero di fase da soddisfare non è maggiore di allora se ne può usare una sola, altrimenti sarebbe opportuno utilizzare due o più reti anticipatrici. Tuttavia l’aumento del modulo può pregiudicare il poter utilizzare questo metodo (nel caso in cui sia ).
- Se si decide di optare per una rete anticipatrice e ancora non viene completamente compensato dal recupero che la rete offre, si può agire direttamente su per avere in unità naturali per .
- Cazzo è la frequenza di lavoro?
Attenuatrici o integrative
Una rete attenuatrice ha una FdT del tipo:
con , uno zero in e un polo in .
All’aumentare di cresce il ritardo di fase e diminuisce l’attenuazione del modulo nella pulsazione di crossover
- si trova da con la FdT a catena aperta prima dell’inserimento della rete integrativa
- La si trova da dove è la frequenza di lavoro per cui l’attenuazione e la perdita di fase coincidano con le specifiche (non troppo grande altrimenti costante di tempo molto grande ⇒ risposta troppo lenta)
- Quindi le reti attenuatrici si usando quando si vuole attenuare il modulo senza troppo toccare la fase.
- Cazzo è la frequenza di lavoro?
Integro-derivative o lead-lag
La loro FdT è:
Cioè sono frutto del collegamento in serie di una integrativa e di una derivativa, quindi forniscono in un colpo solo attenuazione di modulo e recupero di fase alla frequenza .
- Si progetta prima la derivativa, per garantire un recupero di fase maggiore di quello necessario, poichè la integrativa comporterà una perdita della stessa.
- Se l’anticipo è molto alto, usare più derivative in serie.
- Si progetta poi la rete integrativa scegliendo in modo da avere l’attenuazione di modulo richiesta ed una perdita di fase sopportabile.
Altre reti di compensazione
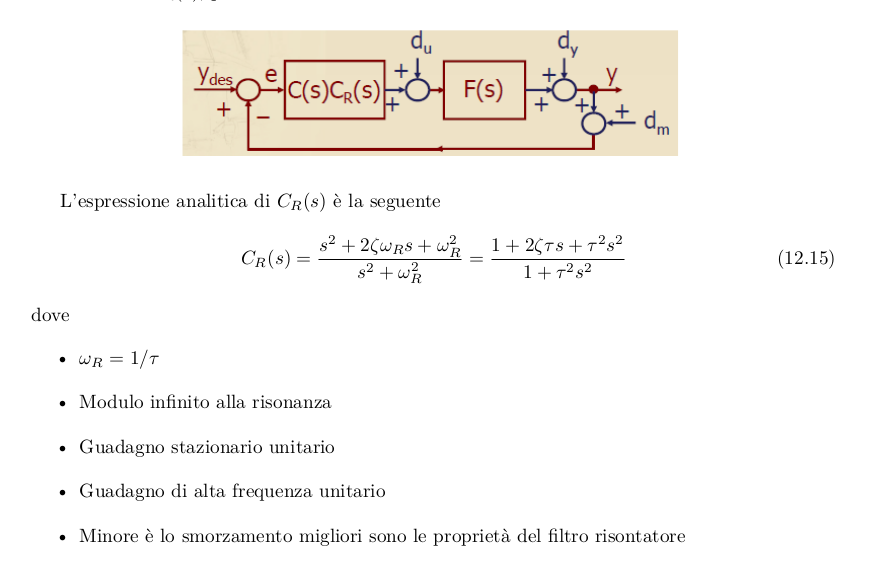
Filtro risonatore
È possibile annullare ogni disturbo se tutti i disturbi agenti sul sistema sono alla medesima e unica pulsazione nota .
Si fa aggiungendo un filtro risonatore a monte del disturbo attivo.
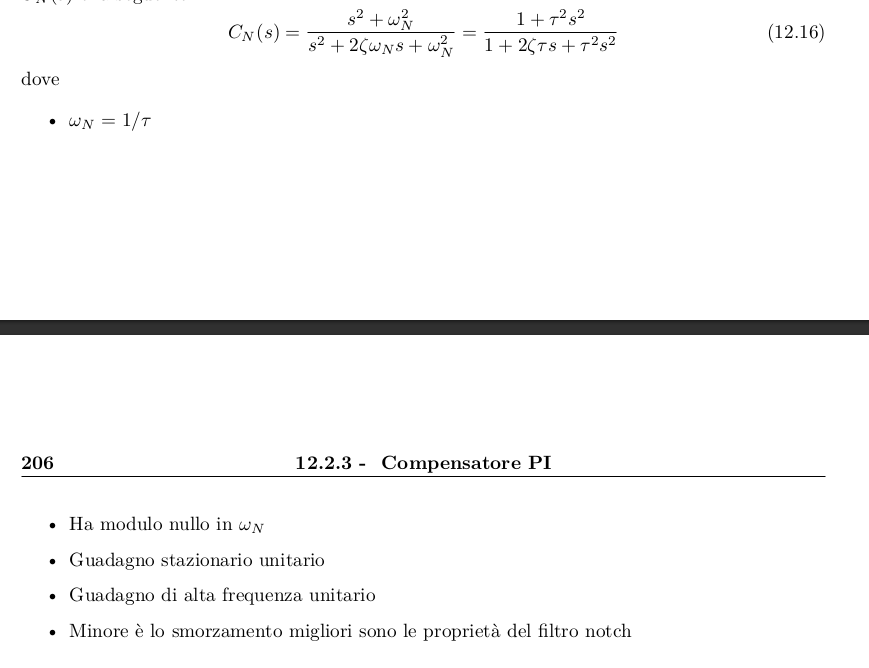
Filtro notch
Stessa cosa del filtro risonatore ma invece di metterlo a monte del disturbo attivo lo metti a valle dell’ultimo disturbo attivo.
Compensatore PI
Se le specifiche di precisione impongono una catena aperta di tipo 1, allora il controllore dovrebbe contenere un polo nell’origine ().
Se in tali casi serve anche un buon anticipo di fase può essere conveniente “aggiungere uno zero reale” ovvero avere un controllore con funzione di trasferimento
Si può usare quindi al posto di una rete derivativa.
- Come cazzo determino ?
Introduzione di poli reali instabili
Esiste un controllore , internamente stabile se il sistema presenta un numero pari di poli tra ciascuna coppia di zeri sul semiasse reale non negativo
Ciò vuol dire che a volte è necessario inserire un polo instabile nel controllore per stabilizzare il
sistema. È possibile che introdurre anche uno zero per avere un anticipo di fase.

- Anche qui come cazzo determino il tuttecose?
Controllori PID
Famiglia particolare di controllori, costituiti da una parte Proporzionale, una Integrativa e una Derivativa.
Per poterli progettare si può scegliere una delle seguenti vie:
- Utilizzare un metodo di taratura in anello chiuso effettuata retroazionando il sistema con un compensatore statico
- Utilizzare un metodo di taratura in anello aperto effettuata sul sistema senza inserire alcun tipo di controllo
Sono caratterizzati da tre parametri liberi, i quali, una volta individuati, permettono di ottenere il controllore; proprio per questo
motivo i PID sono utilizzati in situazioni semplici (statiche) e difficilmente riescono ad operare in situazioni più complesse (dinamiche).
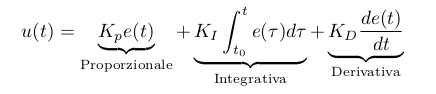
- Il termine proporzionale amplifica l’ingresso e non è in grado di garantire errori di inseguimenti nulli
- Il termine integrale elimina l’errore in regime permanente a fronte di segnali di riferimento costanti (e disturbi additivi costanti sull’uscita. Introduce un ritardo di fase)
- La parte derivativa può portare ad un’eccessiva attività sul comando
I parametri liberi sono , e . La FdT di un controllore PID è:
con
- tempo integrale
- tempo derivativo
La FdT tuttavia se la scrivi per esteso è improprio quindi irrealizzabile ⇒ va aggiunto un polo di chiusura all’interno del blocco derivativo. Quindi la FdT reale di un controllore PID è:
Solo che pure questa cosa presenta problemi: in particolare, la parte derivativa ha ora una Delta di Dirac come risposta al gradino.
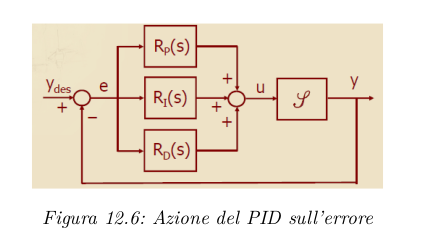
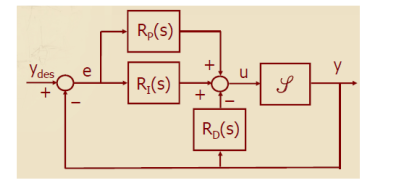
Per ovviare si può decidere di modificare lo schema in due modi:
- applicare la rete derivativa solo sull’uscita e poi sommarla agli altri due contributi (gli zeri dalla catena chiusa diventano l’unione tra quelli del modello matematico del sistema fisico e lo zero della parte integrativa, mentre i poli restano invariati)
- per non far comparire lo zero della parte integrativa nella funzione di trasferimento della catena chiusa, si può spostare anche la parte proporzionale (i poli restano comunque invariati)
Metodi di taratura
Taratura = scegliere i 3 parametri , , .