Scrivere le equazioni di stato del sistema, ma c’è un componente non lineare (6.2)
Meccanico traslazione
Scrivere le equazioni del moto (1.1)
Scrivere le equazioni del moto, ma il sistema è in verticale (6.3)
Scrivere la funzione di trasferimento tra una forza esterna e una posizione (variabile di stato), in cui una forza è applicata ad un punto materiale (5.6)
Meccanico rotazione
Pendolo inverso
Scrivere le equazioni di stato (1.2)
Scrivere le equazioni del moto (4.4)
Termico
Un corpo dentro l’altro
Scrivere il polinomio caratteristico di A (1.13, 3.11)
Scrivere A, B, C (6.4)
Corpi separati, in contatto termico tra loro e con l’ambiente
Scrivere le equazioni dinamiche (non di stato) (7.2)
Scrivere la matrice A (5.4)
Elettromeccanico
Comandato in armatura
scrivere le sole equazioni dinamiche (2.1, 7.8)
Funzione di trasferimento
Calcolare la funzione di trasferimento
Date le equazioni di stato
Date 3 equazioni di stato, ma abbastanza semplici, della serie che ogni equazione di stato che mi serve ha un solo termine al secondo membro
Tempo discreto (2.3)
Date 2 equazioni di stato e un parametro, ma anche qui, le equazioni che mi servono davvero sono semplici
Tempo continuo (3.13)
Date le equazioni di stato, in cui compare anche una variabile interna da esplicitare (5.10)
Date le matrici di un sistema LTI MIMO, scrivere la funzione di trasferimento tra un’uscita specifica e un ingresso specifico (6.5, 7.13)
Date le sole dimensioni delle matrici di un sistema LTI e noto che il sistema è sia completamente osservabile che completamente raggiungibile, indicare la forma della corrispondente funzione di trasferimento (2.8)
Date le matrici in chiaro, con matrice 3x3 ma abbastanza “semplice” perchè piena di 0 (nel caso si trasformasse in equazioni si avrebbero equazioni di stato semplicissime, con un solo termine in ogni secondo membro che ci serve) dire la forma della funzione di trasferimento del sistema, in particolare il termine di grado massimo del numeratore e il denominatore completo (4.5)
Determinare l’insieme delle costanti di tempo dei poli del sistema data la funzione di trasferimento (6.13, 5.9)
Stabilità interna
Analizzare la stabilità interna
Tempo continuo
Tempo discreto
Dati gli autovalori in chiaro (1.3, 3.3)
Data la matrice A 4x4 ma diagonale a blocchi (2.7)
Data la matrice A 3x3, e c’è un parametro, e la matrice è anche se non si capisce bene triangolare a blocchi (6.8, 7.7)
Analizzare la stabilità di un punto di equilibrio dato un sistema linearizzato di cui sono note le matrici A,B,C,D
Tempo continuo
4x4, ma diagonale a blocchi (1.4, 6.9)
Tempo discreto
3x3, in funzione di un parametro (5.2)
4x4 ma triangolare a blocchi (7.11)
Stabilità esterna
Determinare per quali valori di un parametro p il sistema risulta esternamente stabile
Tempo continuo
Sistema di ordine superiore al secondo
un solo parametro (1.7, 3.4, 5.4)
due parametri (5.11)
Tempo discreto
Sistema di ordine superiore al secondo (4.12)
Dato il denominatore di una FdT, determinare degli intervalli di un parametro entro i quali si assicura stabilità oppure stabilità + altre condizioni
Tempo discreto
Sistema di secondo ordine (2.9)
Risposta al gradino
Dato un grafico della risposta al gradino di un sistema, determinare la funzione di trasferimento
Con sovraelongazione (1.5)
Senza sovraelongazione (5.3)
Data una funzione di trasferimento, dire quale sia grafico della sua risposta al gradino
Senza sovraelongazione (2.12, 3.9)
Con sovraelongazione (4.13)
Equilibrio
Determinare gli stati di equilibrio corrispondenti ad un ingresso di equilibrio noto
Tempo continuo
Con parametro (4.10)
Senza parametri (1.6)
Tempo discreto (4.9)
Linearizzare un sistema non lineare intorno ad un punto di funzionamento (2.6, 3.8, 5.13, 7.5)
Uscita
Determinare i primi campioni dell’uscita nel tempo di un sistema a tempo discreto, data la sua funzione di trasferimento e un ingresso (5.12)
Determinare l’espressione analitica dell’uscita del sistema nel tempo
data la funzione di trasferimento e un ingresso
Tempo continuo (1.8, 3.1)
date le matrici e una condizione iniziale, ingresso nullo
Tempo continuo (4.7)
date le equazioni di stato, non sono semplici
Tempo discreto (6.6)
Tempo continuo (7.3)
dato il modello ingresso-uscita e un ingresso sinusoidale (5.7)
Calcolare il valore finale in regime permanente y∞
Dato un ingresso a gradino (1.9, 3.12, 5.5, 6.7)
Dato un ingresso sinusoidale (1.10, 3.2, 4.1, 5.10)
Dato un ingresso a rampa (4.2)
Regolatore dinamico
Determinare i coefficienti di K
Matrice A 2x2 (1.11, 3.5)
Matrice A 3x3 (2.4, 4.6, 5.8)
Matrice A 3x3, ma in forma compagna inferiore (5.6)
Date le matrici del sistema in funzione di un parametro, dire per quali valori è possibile progettare una retroazione statica degli stati (controllare la raggiungibilità)
Matrice 2x2 (6.10)
Date le matrici del sistema in funzione di un parametro, dire per quali valori è possibile progettare un osservatore asintotico (controllare l’osservabilità)
Matrice 2x2 (7.1)
Determinare i coefficienti di L
Matrice A 3x3 (1.12, 3.6, 4.8, 5.1)
Matrice A 3x3, in forma compagna destra (2.13, 6.11)
Domanda del cazzo (6.12)
Non so come classificarli
Dato lo schema di un sistema e definita la G(s) in due forme, dire qual è la coppia K∞,Kstaz (2.5)
(2.10)
(2.11)
Soluzioni
1
1
non considerare pA˙ nel vettore degli stati; la seconda eqz del moto è =0, sfrutta questo per scrivere pA˙ in funzione di altro. Occhio al verso del sistema di riferimento.
2
prendi come variabili di stato [θ,θ˙]
il sistema ha delle Torque esterne che si calcolano come prodotto vettoriale tra il vettore lunghezza e la forza. Il modulo del prodotto vettoriale è dato da l⋅F⋅sin(α), con α l’angolo compreso tra i due vettori (considerati come se avessero la stessa origine però, qundi trasporta uno dei due). Il segno del prodotto vettoriale invece è dato dalla regola della mano destra.
il vettore segnato con la X è entrante nel foglio. Una forza peso perpendicolare al piano in cui si svolge il movimento, per qualche motivo, non genera una Torque esterna.
sin(π/2+x)=cos(x) (scrivile nel formulario ste cose)
leggi dal grafico tempo di picco t^ e sovraelongazione s^ e y∞=K∞
sai che ogni sistema di secondo ordine ha FdT del tipo G(s)=K∞⋅s2+2ζω0s+ω02ω02
usa le formule per trovare ζ e ω0
6
La condizione dell’equilibrio a tempo continuo è che le equazioni di stato si annullino.
Imponi la condizione e poi trova tutte le possibili combinazioni dei valori delle variabili di stato da tali equazioni, facendo ragionamenti del tipo “dalla prima equazione risulta che x1 assume o questo o quel valore; se assume questo, x2 assume… se invece x1 assume quest’altro, x2 assume…”
7
Il sistema è di ordine superiore al secondo, quindi serve Cartesio + Routh
Cartesio vuole che tutti i coefficienti siano concordi, Routh vuole che la prima colonna della tabella di Routh sia fatta da coefficienti concordi
Routh parte dall’ordine del sistema e finisce a 0
8
Trasformi l’ingresso, lo moltiplichi alla FdT e antitrasformi tutto.
Laplace, s’intende.
Si mette sempre un gradino a moltiplicare ogni termine antitrasformato, forse perchè la trasformata che usiamo è unilatera dx.
Dato che c’è un termine al quadrato nel denominatore, devi usare la formula con la derivata per calcolare uno dei residui: non perdere tempo, la calcolatrice può calcolare il valore della derivata in un punto.
Prima controlli la raggiungibilità (con la calcolatrice)
Il sistema è raggiungibile quindi fai tutto il panegirico (lunghissimo).
12
Prima controlli l’osservabilità (con la calcolatrice)
Il sistema non è osservabile quindi ti fermi.
13
Ricordati che solo il corpo esterno scambia calore con l’esterno e quindi ha il termine che ne tiene conto nelle pressioni termiche esterne
Sono tanti passaggi ma tutti brevi
2
1
Le equazioni dinamiche sono solo quella di armatura (che praticamente copi dal formulario) e quelle meccaniche (che sono effettivamente da scrivere).
Nel testo ti da delle formule per la forza elettromotrice e la coppia motrice che sovrascrivono le equazioni canoniche di conversione dell’energie conespressioni più semplici.
Prima controlli la raggiunibilità con la calcolatrice.
Non è raggiunibile, quindi ti fermi.
5
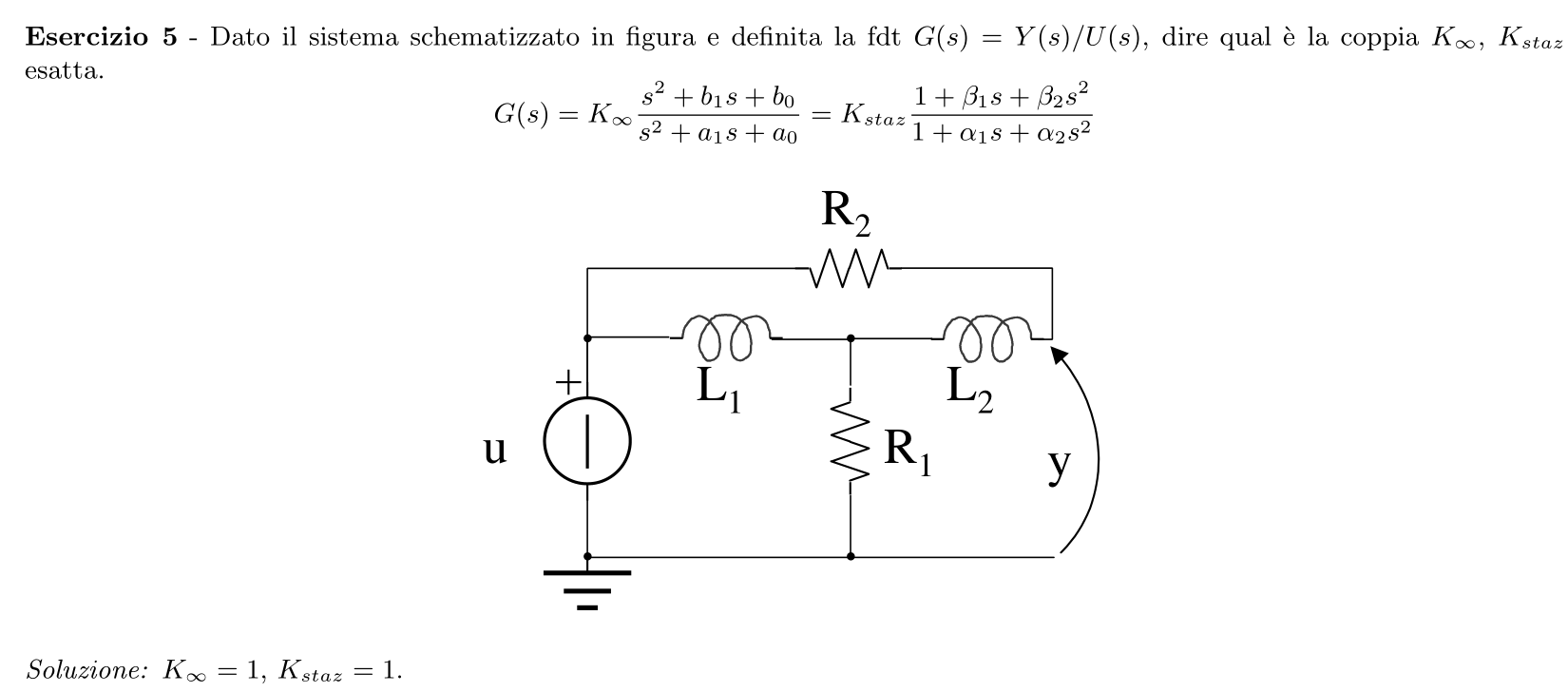
Si tratta di trovare il guadagno K∞ (che è il guadagno ad alta frequenza, s→∞) e il guadagno Kstaz (che è il guadagno in bassa frequenza, s→0)
Dato che abbiamo lo schema di un sistema elettrico, senza calcolare esplicitamente la funzione di trasferimento e poi andare a sostituire s=∞ e s=0, possiamo analizzare cosa succede ai componenti dinamici.
Gli induttori in alta frequenza diventano circuiti aperti, in bassa frequenza circuiti chiusi.
I condensatori in alta frequenza diventano circuiti chiusi, in bassa frequenza circuiti aperti.
Allora, ridisegnandoli, gli schemi diventano stupidi, possiamo quindi andare a calcolare rapidamente i guadagni computando Y/U.
Il sistema è in forma minima, per cui non avrà più cancellazioni zero-polo e quindi la funzione di trasferimento avrà grado di termine massimo del numeratore e del denominatore pari alla dimensione di A
inoltre (credo) la presenza di un D=0 implica la presenza di un K=1 nella funzione di trasferimento.
9
Essendo a tempo discreto bisognerebbe usare le 3 disequazioni ed eventualmente Jury.
Non serve Jury essendo di secondo ordine.
Per la seconda richiesta bisogna mantenere i vincoli trovati prima ma anche aggiungere un vincolo che ci dia la sicurezza che le radici NON abbiano parte reale strettamente negativa, ma positiva.
In pratica, dobbiamo imporre che NON sia rispettato Cartesio (quindi che il coefficiente del termine di mezzo sia DISCORDE dagli altri, quindi che sia negativo).
10
Usando la trasformata di Laplace e poi il teorema del valore finale si arriva a dare un vincolo tra y∞ e K, ovvero y∞=80/K.
L’esercizio non ci permette di avere informazioni specifiche su K, quindi ci tocca sostituire le varie opzioni di risposta del quiz e vedere quale rispecchia questo vincolo.
Sempre sperando che sia una sola, a rispettare questo vincolo. Però in teoria deve essere così:
11
Come in 1.10, va usata la trasformata di Laplace, ma dato che chiede l’ampiezza della y(t) per t→∞ (cioè in regime permanente), posso usare la formula
Comunque arriverò solo a determinare A=0. A quel punto bisogna sperare che, come in 1.10, nelle risposte che mi vengono proposte una sola abbia A=0.
12
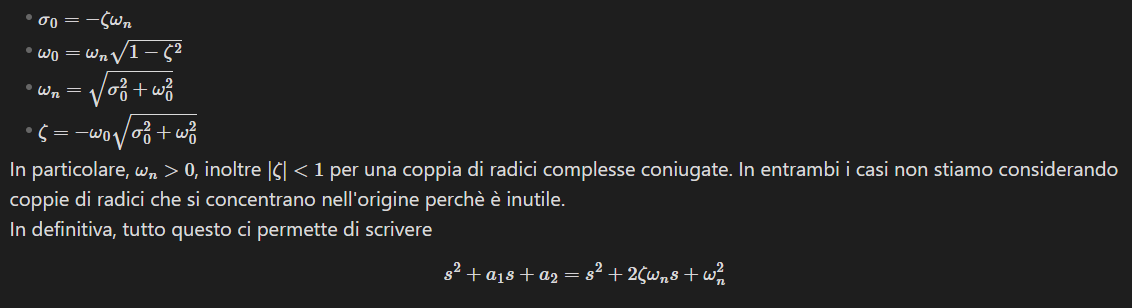
Prima di tutto calcolati i poli della FdT.
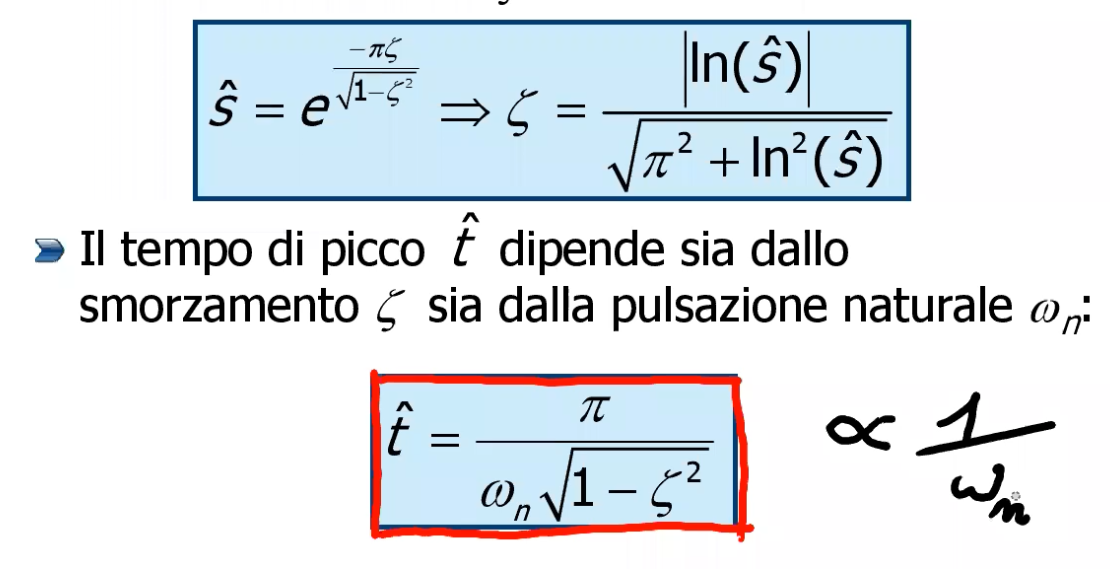
Per ricavare smorzamento e pulsazione naturale dalla FdT, si usano:
Nel caso i poli non fossero complessi coniugati, ma reali, lo smorzamento sarebbe ζ=1, quindi non si avrebbe sovraelongazione. Succede proprio questo in questo caso, quindi non posso usare le formule per trovarmi tempo di picco e sovraelongazione partendo da smorzamento e pulsazione naturale. Devo usare un’altra strada.
Dopo puoi calcolare la costante di tempo equivalente dalla FdT, pari alla somma delle costanti di tempo della FdT.
La costante di tempo relativa ad un polo si calcola come τp=∣1/p∣.
La costante di tempo equivalente per sistemi di secondo ordine con smorzamento unitario è τeq=τ1+τ2. In questo modo, la puoi calcolare dalla FdT.
La costante di tempo di una risposta al gradino, sia essa equivalente o meno, è visibile sul grafico ed è pari al tempo che impiega il grafico ad arrivare al 63% del suo valore finale y∞.
K=costante al numeratore/termine noto denominatore.
Dal grafico, invece, il valore finale y∞ è uguale al guadagno, perchè K=y∞/u (se u è 1, cioè se il gradino è unitario). Qui K=2.5.
Quindi combinando lo smorzamento unitario, la costante di tempo equivalente e il guadagno K, si arriva a dire quale sia il grafico corretto.
13
Essendo in forma canonica di osservabilità, posso già partire con il delirio (lunghissimo).
3
1
Come 1.8
2
Come 1.10
3
Come 1.3
4
Come 1.7
5
Come 1.11
6
Come 1.12
7
Come 2.2
8
Come 2.6
9
Come 2.12
10
Stai solo attento a considerare correttamente l’ordine delle variabili nei vettori che ti da lui
Guardando dal vettore delle variabili di stato che ti da lui puoi ricordarti le equazioni costitutive
Cerca di usare sempre il minor numero di equazioni e di non scriverle tutte e basta
11
Come 1.13
12
Come 1.9
13
Usa direttamente Laplace, comunque dato che chiede la funzione di trasferimento Y/U il senso è scrivere tutto ciò che sta nel secondo membro dell’espressione della Y in funzione di Y o di U (in questo caso, va riscritta X1, quindi X2, in funzione di U)
4
1
Come 1.10
2
Prima controlli che sia stabile esternamente.
Dato che con l’ingresso a rampa non mi pare di avere una formula veloce, fai tutti i passaggi.
Devi usare il teorema del valore finale.
3
Come 3.10
4
Standard. Ricordati solo che gli smorzatori che stanno a identificare un attrito hanno formula β(θ˙corpo−0)
5
NON si può concludere nulla direttamente, data la possibilità che ci siano cancellazioni zero-polo (il sistema potrebbe non essere in forma minima e di sicuro non ti metti a controllarlo, altrimenti diventa lunghissimo).
Non puoi nemmeno concludere nulla immediatamente sul denominatore, sempre per le possibili cancellazioni zero-polo
Ti conviene trasformare in equazioni di stato e usare Laplace, tanto le equazioni sono semplici e finisci rapidamente
6
Come 2.4
7
Puoi usare direttamente la formula con le matrici per calcolare la Y, usi quella perchè hai le matrici e trasformando in equazioni e usando Laplace non sarebbe altrettanto veloce.
A quel punto antitrasformi.
8
Come 3.6
9
La condizione di equilibrio è che primo e secondo membro delle equazioni alle differenze siano uguali.
Imponi questa e cerchi le combinazioni possibili di valori assumibili dalle variabili di stato.
Mi sa che la prima cosa da fare è controllare se ha sovraelongazione o no.
Avendo la funzione di trasferimento in chiaro, posso calcolare lo smorzamento: se è diverso da 1, allora ha sovraelongazione. A quel punto posso valutare tempo di picco / sovraelongazione e selezionare il grafico.
5
1
Come 1.12
2
Provi a calcolare gli autovalori in funzione di k e ad imporre che abbiano tutti modulo strettamente minore di 1.
In questo caso c’è un autovalore che non dipende da k e che ha di per sè modulo maggiore di 1, quindi il punto di equilibrio è da considerarsi instabile per ogni valore di k.
3
Prima di tutto si considera che, dato che non si ha sovraelongazione, deve essere ζ=1, ovvero la FdT deve avere due poli reali.
Per scrivere una FdT di questo tipo guardando solo il grafico è necessario ammettere che questi due poli reali siano coincidenti.
Una FdT avente solo due poli reali coincidenti ha la forma G(s)=(1+τps)2K, dove τp è la costante di tempo di uno dei due poli coincidenti: infatti, se i due poli reali sono coincidenti, avranno la stessa costante di tempo τ1=τ2=∣1/p∣=τp. Allora la costante di tempo equivalente del sistema è τ=τeq=2⋅τp.
La costante di tempo equivalente, cioè la somma delle due, la leggi dal grafico come l’istante al quale il grafico tocca per la prima volta il 63% del suo valore finale y∞.
Una volta trovata la costante di tempo equivalente, la dividi per 2 ottenendo quella del singolo polo.
Il K è pari a y∞/u, quindi se il gradino è unitario, K=y∞.
Conoscendo quindi τp e K puoi scrivere la FdT.
4
Banale, basta seguire le regole dei termici… in particolare ricorda che tutti i corpi sono in contatto termico con l’esterno.
5
Come 1.9
6
Va considerato il punto materiale di posizione y0 per avere due corpi e quindi due equazioni del moto, anche se la seconda si eguaglia a zero.
Ricordati però che la velocità del punto materiale non è da mettere nel vettore delle variabili di stato.
Poi usi Laplace.
7
Tutto regolare in realtà, ovvero dal modello ingresso/uscita ricavi facilmente la G(s), la moltiplichi per la trasformata di Laplace dell’ingresso (sì, devi fare la trasformata di un seno) e poi antitrasformi.
La trasformata del seno è (dalle tavole)
L’antitrasformata c’è da stare attenti, perchè compaiono due poli complessi coniugati. Bisogna quindi usare la formula (che è nelle tavole)
la k sta lì perchè i poli complessi coniugati potrebbero anche avere molteplicità >1
8
Come 2.4
9
Come 6.13
10
Dato che chiede la funzione di trasferimento G(s)=Y/U è necessario esplicitare tutte le altre variabili che si trovano esplicitamente o non nell’espressione dell’uscita in funzione di Y o U.
11
C’è da scrivere una condizione che comprenda entrambi e magari che in un colpo solo dia vincoli ad entrambi. Per il resto è semplicemente da usare Cartesio + Routh come al solito.
12
Tecnicamente dovrebbe essere semplice, fai l’uscita come G(z)⋅U(z), poi antitrasformi e calcoli y(0),y(1)…y(3)
Occhio alla trasformata del gradino nel dominio della trasformata zeta: è z−1z.
Occhio a fare quella cosa del fare i fratti semplici della funzione di trasferimento pre-divisa per z e moltiplicare i fratti semplici per z solo dopo averli calcolati, in modo da ritrovarti con qualcosa di anti-trasformabile con le tavole.
13
Come 2.6
6
1
Come 2.2
2
Procedi come al solito, semplicemente consideri nota la variabile interna del diodo. La variabile del diodo infatti è nota nella sua espressione.
Al momento opportuno (quando devi scrivere le equazioni di stato) sostituisci la variabile interna con la sua espressione, che comunque ti è stata data.
A quel punto devi comunque scrivere l’espressione del diodo riformulandola in modo che sia scritta in funzione delle variabili di stato del sistema.
3
Nulla di strano, semplicemente ricordati che esiste la forza peso e che è una forza esterna, e in questo caso è da considerarsi negativa perchè opposta nella sua direzione a quella presa come riferimento per il moto.
La forza peso è una forza esterna e va scritta nelle equazioni del moto, ma poi diventa costante nella equazione di stato, motivo per cui non è nel vettore degli ingressi del sistema.
4
Come 1.13, solo che scrivi le matrici. Insomma, il solito sistema termico.
5
Usa la formula con le matrici per scrivere la funzione di trasferimento, ma al posto di C e B metti C1 e B1, cioè considera solo le parti delle matrici relative all’uscita e all’ingresso che ti interessano.
Poi procedi come al solito, come se fosse un sistema SISO.
6
Le equazioni di stato non sono semplici, quindi conviene trasformarle in matrici e fare la formula con le matrici per trovare l’uscita nel dominio della Zeta.
Ricordati che c’è una z a moltiplicare la prima parte della formula dell’uscita.
Poi antitrasformi: ricordati quella cosa del fare i fratti semplici della funzione di trasferimento pre-divisa per z e moltiplicare i fratti semplici per z solo dopo averli calcolati.
7
Come 1.9
8
La matrice è triangolare a blocchi, se lo vedi sei salvo almeno un pochino. In quel caso ti accorgi che devi controllare il polinomio caratteristico solo di una sottomatrice 2x2 e quindi bastano le 3 diseq.
Altrimenti puoi comunque farlo ma non hai scorciatoie, quindi farai il polinomio caratteristico con un procedimento più lungo, e poi le tre diseq + Jury dato che è di ordine superiore al secondo.
9
Come 1.4
10
Controlla la raggiungibilità e imponi quindi che la matrice di raggiungibilità abbia rango massimo, ovvero determinante diverso da 0.
11
Come 2.13
12
Essendo completamente osservabile ma non completamente raggiungibile, si può fare solo lo stimatore asintotico.
13
Le costanti di tempo si trovano con la formula
quindi NON esistono costanti di tempo negative, in quel caso vuol dire che i poli sarebbero non stabili; solo i poli stabili hanno costanti di tempo.
7
1
Imponi il determinante diverso da 0 per la matrice di osservabilità.
2
Abbastanza semplice, solo una rottura di coglioni. Il generatore di calore interessa solo il corpo all’interno del quale si trova. Ogni corpo scambia calore con l’universo e con i corpi con cui è in contatto.
3
Le equazioni non sono semplici, quindi non usi Laplace, ma usi la formula per calcolare l’uscita con le matrici, e poi antitrasformi.
4
Come 1.7
5
Come 2.6
6
Skippi check raggiungibilità, ma il resto lo fai.
7
In realtà qui si capisce perchè è direttamente triangolare, non a blocchi.
Essendo questo, non ti serve fare Jury, perchè vedi immediatamente gli autovalori e ti basta imporre che abbiano modulo minore strettamente di 1.
8
Come 2.1
9
Come 3.10 ma fai anche le altre matrici.
10
Come 1.10
11
Trova gli autovalori e controlla che siano a modulo strettamente minore di 1.
12
Come 2.2
13
Come 6.5
Indri
Scraping delle 5 Tipologie LADISPE + BONUS specifica su sensibilità
Tipologia 1
Esercizio 1
Sistema: F1 tipo 0, F2 tipo 1; stabilità regolare: sì
Errore di inseguimento massimo alla rampa pari a …
Effetto di d1 sull’uscita massimo pari a …
Effetto di d2 sull’uscita massimo pari a …
Specifiche dinamiche
banda passante pari a … +- … %
sovraelongazione massima pari a …
Valutare
tempo di salita
picco di risonanza
errore di inseguimento massimo a un riferimento sinusoidale di frequenza pari a … in assenza di disturbi
Discretizzazione
valutare tempo di salita e sovraelongazione
Esercizio 2
Nyquist
retroazione: negativa
modalità: valutazione stabilità per valori puntuali di K
zoom a fianco: no
Esercizio 3
PID
c’è questo che sarebbe il terzo esercizio ma è fattibile quindi lo metto
mi da lui N? sì
valutare
tempo di salita
sovraelongazione massima
Tipologia 2
Esercizio 1
Sistema: F1 tipo 0, F2 tipo 1; stabilità regolare: sì
Disturbi: d1 costante intermedio
Kr: 1
Specifiche statiche
Errore di inseguimento massimo al gradino nullo
Errore di inseguimento massimo alla parabola pari a …
effetto di d sull’uscita massimo pari a …
Specifiche dinamiche
banda passante pari a … +- … %
sovraelongazione massima pari a …
Valutare
tempo di salita
picco di risonanza
valore massimo del comando applicato dal controllore con riferimento gradino
Discretizzazione
valutare tempo di salita e sovraelongazione
Esercizio 2
Nyquist
retroazione: negativa
modalità: risposta chiusa sugli intervalli di K e sui poli instabili
zoom a fianco: si
Tipologia 3
Esercizio 1
Sistema
dato nella forma di servomeccanismo di posizione, con funzioni di trasferimento per attuatore, impianto e trasduttore di posizione. A = F1 (ed è solo un guadagno statico), G_P = F2 (tipo 1), T_P = 1 / Kr.
Stabilità regolare: no (il sistema ha guadagno stazionario negativo - il diagramma di Nyquist conferma i dubbi - serve Kc negativo)
Kr = 1
disturbi: d1 costante intermedio, d2 rampa sull’uscita, d_p sinusoidale sulla retroazione di frequenza data, dopo T_P. I disturbi sono dati come minori o uguali ad un certo valore massimo (ovviamente consideri il valore massimo come il valore del parametro caratteristico del disturbo, quindi procedi come sempre).
Specifiche statiche
errore stazionario di inseguimento alla rampa massimo pari a …
effetto di d1 massimo pari a … (qui detto come : errore stazionario in catena chiusa indotto dal disturbo d1 … ma è uguale)
effetto di d2 massimo pari a …
Specifiche dinamiche
tempo di salita massimo pari a …
sovraelongazione massima pari a …
Valutare
banda passante
picco di risonanza
valore massimo del comando indotto dal disturbo d_p (suppongo quindi senza riferimento, e uso simulink?)
Discretizzazione
valutare tempo di salita e sovraelongazione
Esercizio 2
Ci sarebbe un PID ma secondo me non è per noi, perchè ha specifiche, mentre al nostro esame non ci saranno specifiche sul PID
Tipoogia 4
Esercizio 1
Sistema: F1 tipo 1, F2 tipo 0, Kr = 1; stabilità regolare: sì
errore di inseguimento alla rampa massimo pari a …
effetto di d1 massimo pari a …
effetto di d2 massimo pari a …
Specifiche dinamiche
tempo di salita pari a … +- … %
picco di risonanza massimo pari a …
Valutare
banda passante
sovraelongazione
valore massimo del comando in assenza di disturbi con riferimento gradino
Discretizzazione
Valutare tempo di salita e sovraelongazione massima
Esercizio 2
Nyquist
retroazione: positiva
modalità: valutazione stabilità per valori puntuali di K
zoom a fianco: no
PID
c’è questo che sarebbe il terzo esercizio ma è fattibile quindi lo metto
mi da lui N? sì
valutare
banda passante
picco di risonanza
Tipologia 5
Esercizio 1
Sistema: F tipo 0, Kr = 1
Disturbi: d1 costante intermedio, d2 rampa sull’uscita, d3 sinusoidale di frequenza nota sulla retroazione
Specifiche statiche:
errore di inseguimento alla rampa massimo pari a …
effetto di d1 nullo
effetto di d2 massimo pari a … (molto piccolo)
Specifiche dinamiche
tempo di salita pari a … +- … %
sovraelongazione massima pari a …
Valutare
banda passante
errore di inseguimento massimo in regime permanente a riferimento sinusoidale di frequenza nota
valore massimo del comando indotto da d3 (immagino con riferimento spento)
Esercizio 2
Niente di fattibile
BONUS: Esercizio di progetto di un controllore con specifica sulla sensibilità (svolgimento a lezione e nelle videolezioni)
Sistema: F1 tipo 0, F2 tipo 1, Kr = 1
Disturbi: d1 costante intermedio
Specifiche statiche
effetto di d massimo pari a …
errore di inseguimento alla rampa massimo pari a …
Specifiche dinamiche
modulo della funzione di sensibilità pari strettamente minore di 1 in pulsazione nota (20 rad/s)
picco di risonanza massimo pari a …
Valutare
tempo di salita
sovraelongazione
errore di inseguimento massimo alla sine wave di frequenza nota (2 rad/s)
effetto del disturbo sinusoidale di frequenza nota (200 rad/s) entrante INSIEME a y_des (tecnicamente sarebbe come rimuovere il riferimento e mettere questo come riferimento, quindi anche in questo caso diventa un errore di inseguimento quello che vai a calcolare)
Discretizzazione
valutare tempo di salita e sovraelongazione.
BONUS: Esercizio di progetto di un controllore (svolgimento a lezione)
Soluzioni
Tipologia 1
Esercizio 1
Risultati dell’analisi delle specifiche
Numero di poli nell’origine del controllore:
Guadagno stazionario minimo del controllore:
Pulsazione di attraversamento desiderata:
Margine di fase minimo richiesto:
Eventuali commenti:
Funzione di trasferimento del controllore progettato (in forma fattorizzata in costanti di tempo):
C(s):
Breve relazione sul progetto di C(s):
Verifica del soddisfacimento delle specifiche:
a)
b)
c)
d)
e)
Valutazione delle prestazioni richieste ad anello chiuso:
α)
β)
γ)
Discretizzazione del controllore:
Passo di campionamento T:
C(z):
Motivazioni della scelta di T, metodo di discretizzazione utilizzato e valutazioni richieste ad anello chiuso: