Stimatore dinamico
Molto spesso non hai accesso allo stato del sistema. Perchè magari è troppo complesso, anche se in sè il sistema è completamente raggiungibile. Allora devi stimarlo.
Lo stato di un sistema si può stimare tramite un ulteriore sistema dinamico che si chiama stimatore dinamico.
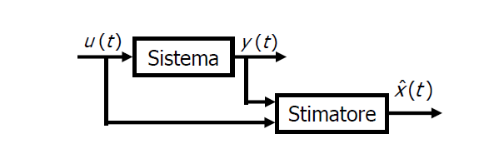
Questo ovviamente nello stimare compirà degli errori; l’errore di stima è ma esso potrebbe annullarsi per , caso in cui si dice che lo stimatore è uno stimatore asintotico dello stato. Ciò è estremamente conveniente perchè vuol dire che a regime lo stimatore sarà perfetto nel ritrovare lo stato del sistema.
Warning
Possibilità di errore nella stima dello stato
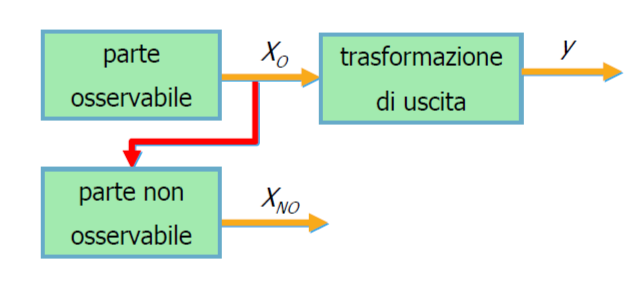
Anche qui come nel caso della raggiungibilità, nel caso in cui il sistema non sia completamente osservabile, allora si hanno alcuni autovalori relativi alla parte osservabile e alcuni relativi alla parte non osservabile.
La parte non osservabile del sistema, per definizione, non può influenzare l’uscita del sistema, quindi se guardando ne traggo la conclusione che il sistema è partito da uno stato iniziale , potrei commettere un errore (magari era partito da ).
La certezza che funzioni tutto la hai solo se il sistema è completamente osservabile.
Tuttavia anche l’errore di stima non possiamo saperlo, ma sappiamo tramite magheggi folli che esso è pari a:
per cui se tutti i modi di convergono asintoticamente a , allora anche l’errore di stima tenderà a . Quindi il punto è trovare (che è un vettore di dimensione ) tale per cui la matrice abbia autovalori asintoticamente stabili.
Questo succede se il sistema è completamente osservabile: se sì, allora è possibile trovare una tale che se uso lo stimatore in un sistema reazionato per assegnare gli autovalori che dico io esso funziona piiiicisu piiiicisu.
Regolatore dinamico
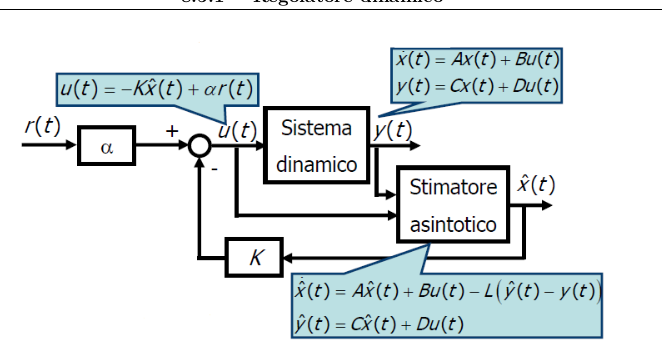
Il regolatore dinamico è la somma di stimatore asintotico dello stato e legge di controllo.
La struttura di controllo completa è così:
Per avere entrambe le componenti funzionanti (uno stimatore asintotico che davvero stimi bene lo stato e la retroazione, cioè la legge di controllo, che davvero modifichi tutti gli autovalori) il sistema deve essere:
- completamente osservabile per lo stimatore asintotico (per il progetto di )
- completamente raggiungibile per la legge di controllo (per il progetto di )
Alla fine, il sistema completo avrà equazioni:
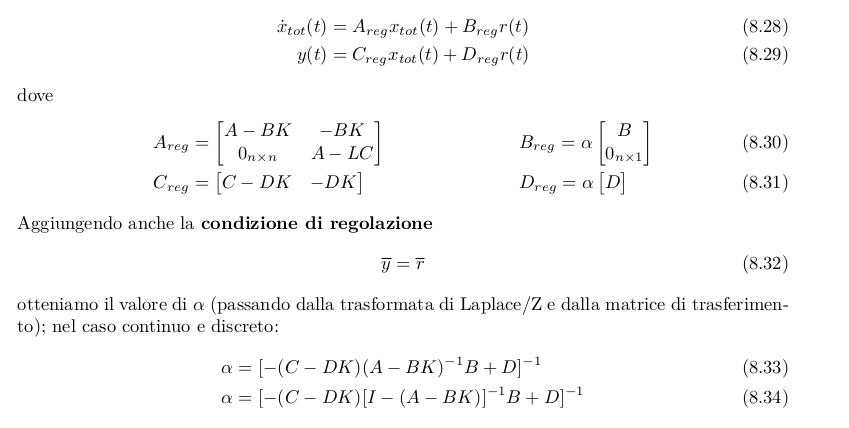
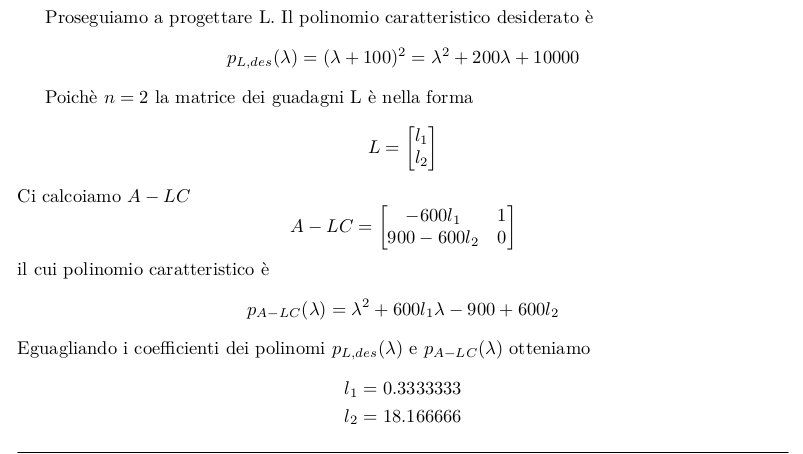
Per il progetto di serve che siano asintoticamente stabili i modi della matrice e per ottenere ciò a quanto pare servono troppe cervella. Quindi generalmente negli esercizi mi sa che ci danno direttamente quali devono essere gli autovalori del sistema interno dello stimatore dinamico dello stato; noi semplicemente eseguiamo gli ordini.