Le proprietà di osservabilità e di rilevabilità descrivono la possibilità di stimare lo stato del sistema tramite l’uscita e l’ingresso.
La differenza delle proprietà di raggiungibilità e controllabilità sta nel fatto che queste ultime si preoccupavano di modificare lo stato del sistema tramite particolari ingressi.
Osservabilità
Riassunto
Se un sistema è completamente osservabile, è sempre possibile capire da quale stato iniziale il sistema è partito guardando l’uscita che sta dando in un certo istante. From future: questo ci aiuta a stimare lo stato interno del sistema guardandolo da fuori, cosa che ci serve per computare il segnale di comando nel contesto di un sistema controllato, in cui abbiamo la retroazione statica dello stato e l’implementazione di una legge di controllo.
Possibilità di stimare lo stato iniziale dati uscita e ingresso.
- Stato non osservabile: uno stato è non osservabile se per qualunque la componente libera dell’uscita conseguente allo stato iniziale risulti nulla per ogni - cioè, mi sembra di capire, se un sistema è immediato nella risposta, quindi non deve settlarsi la risposta libera e poi avere la propria risposta forzata, se ha direttamente la forzata, non è possibile capire da che stato fosse partito (perchè in effetti la sua uscita non dipende mai dallo stato ma solo dall’entrata così)
- Un sistema può avere degli stati non osservabili e averne altri osservabili (per esempio un sistema che ha risposta immediata se l’ingresso è un certo ingresso ma invece deve settlarsi la risposta libera su altri ingressi) → in quel caso c’è un sottospazio di non osservabilità - corrispondente all’insieme di non osservabilità a dimensione minima cioè praticamente siccome come nel caso della raggiungibilità, gli insiemi dipendono dal tempo, ma qui è in negativo, devo prendere con il che porta ad avere l’insieme più piccolo di non osservabilità.
- Se il sottospazio di osservabilità che è il complementare di quello di non osservabilità coincide con tutto lo spazio dello stato allora il sistema è completamente osservabile.
Rilevabilità
Possibilità di stimare lo stato finale** del sistema mediante la misura dell’uscita e dell’ingresso.
- Stato non rilevabile: uno stato è non rilevabile se per qualunque la componente libera dell’uscita che ha come stato finale risulti nulla. Anche in questo caso, quindi, stiamo parlando di un’uscita libera nulla, e quindi di una risposta immediata del sistema che non mi permette di stimare lo stato, sebbene quello stato avesse le caratteristiche in regola per essere uno di quelli che volevo.
- Se il sottospazio di rilevabilità che è il complementare di quello di non rilevabilità, che è l’insieme di non rilevabilità nell’istante in cui esso ha dimensione minima coincide con tutto lo spazio dello stato allora il sistema è completamente rivelabile.
Sistemi LTI
Guarda un po’, anche qui, se un sistema LTI è completamente osservabile, è anche completamente rilevabile.
Sistemi LTI SISO - analisi della osservabilità
La dimensione del sottospazio di osservabilità del sistema LTI SISO è uguale al rango di con il rango di .
Se questa matrice ha rango massimo, allora il sistema è completamente osservabile.
Anche qui la dimostrazione, come nel caso della raggiungibilità, ci è stata fatta solo a TD, include il fatto che una matrice di osservabilità è tecnicamente dipendente dal tempo, quindi dato il tempo che permette alla matrice di avere colonne/righe e dato il fatto che la matrice deve diventare un kernel per lo spazio degli stati (almeno così mi è sembrato di capire) - e questo ci porta, di nuovo, per qualche motivo, a dire che la matrice deve avere rango massimo.
MATLAB
La matrice di raggiungibilità si può calcolare direttamente con il comando
obsv(A, C).
Realizzazione di una funzione di trasferimento secondo la forma canonica di osservabilità

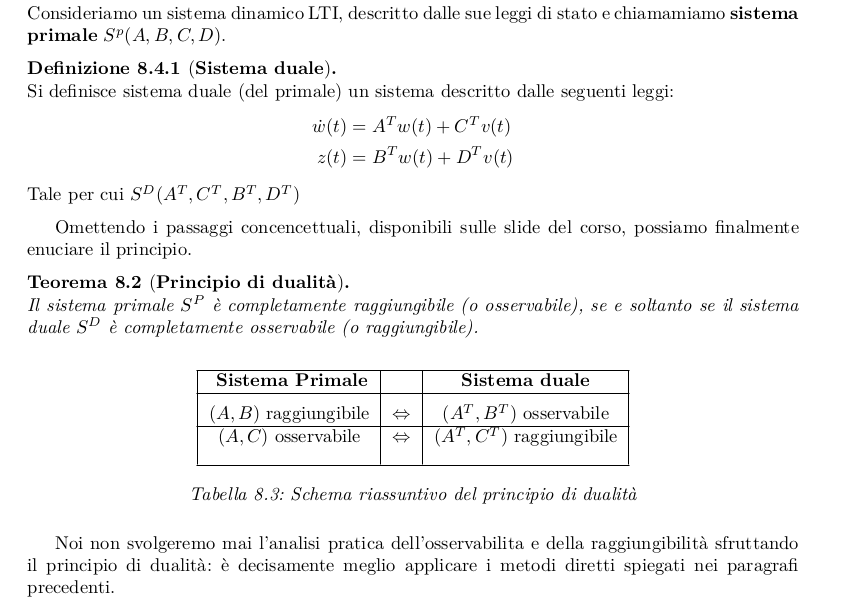
Principio di dualità